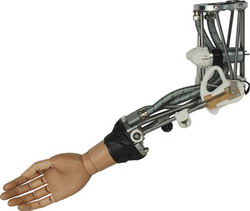
Ученые из фраунгоферского института машиностроения и автоматизации (Штуттгарт, Германия) создали бионическую руку ISELLA. Это приспособление не требует больших финансовых затрат для производства и безопасно в управлении. В основу принципа работы механической руки ISELLA лег принцип работы хобота слона. Несмотря на то, что хобот состоит из 40 тысяч мышц, он обладает не только силой, но и чрезвычайной изворотливостью, подвижностью и мягкостью. «Его гибкость и проворство натолкнули нас на идею создания бионической руки»,— объясняет Харальд Стааб, автор проекта.
В отличие от предшествующих роботов-рук, работавших на одном двигателе, ISELLA оснащена двумя двигателями для управления каждым суставом в отдельности, что обеспечивает повышенную безопасность эксплуатации робота. Кроме того, в отличие от пневматической и гидравлической систем активизации механизма, мускулы ISELLA представляют собой простой экономичный электродвигатель, состоящий из ведущего валика и шнура. Точно так же, как сухожилия связывают мышцы между собой, шнур связывает две сопряженные части механической руки. Ведущий валик прикреплен к центральной точке шнура. Когда валик вращается, шнур наматывается на него, формируя двойную спираль (double helix). Поэтому ученые прозвали этот механизм DOHELIX. Валик не толще, чем шнур, но достаточно прочный, чтобы не допустить разрыва. Прочность обеспечивается благодаря специальному эластичному материалу, который применяется также при строительстве яхт и планеров. В результате, DOHELIX гораздо дешевле и эффективнее редукторного двигателя.
Мышечная система руки состоит из десяти таких DOHELIX мускулов, четыре из которых находятся в локтевом суставе и шесть в предплечье. Механическая рука также гибка, как человеческая. Возможно применение ISELLA в терапевтических целях, например, в качестве недорогих и гибких протезов. По оценке производителей, устройство поступит в продажу в течение ближайших 2-х лет.


